Methods & Theory
This thesis applies machine learning methods to 4D seismic data. In this chapter I introduce 4D seismic concepts and the motivation to acquire and analyze 4D seismic data. I go on to introduce machine learning and review the development of machine learning in itself and in the field of geoscience. The focus on this thesis is on neural networks, particularly dl to geophysical problems. Considering recent developments in computer vision, a focus on convolutional neural networks, the developments and break-throughs of this type of neural network and the innovations that lead to the recent adoption of machine learning in geoscience are explored in a published book chapter, reprinted here.
4D seismic
4D seismic is the analysis of seismic data that was acquired over the same location after some calendar time has passed. The repeated imaging of the same subsurface location highlights changes in the subsurface that can lead to improved understanding of subsurface processes and fluid movement. Exploration & Production companies, in particular, have an interest in imaging hydrocarbon reservoirs (Johnston 2013b). However, 4D seismic imaging has broad applications for subsurface characterization, such as observing volcanic activity (Londoño and Kumagai 2018) or CO2 sequestration monitoring (R. Arts et al. 2004).
The main applications of 4D seismic analysis, according to Özdoğan Yilmaz (2003; Johnston 2013a) include:
Tracking fluid movement (steam, gas, and water)
Monitoring pressure depletion and validating depletion plans
Fault property estimation, i.e. sealing or leaking faults
Locating bypassed oil in heterogeneous reservoirs
Validating and updating geological and reservoir-simulation models
4D seismic data analysis suffers from the superposition of multiple effects on seismic imaging. These effects include changes in the acquisition equipment due to technological advances, changes in acquisition geometry (source-receiver mismatch), as well as physical changes in the subsurface (Özdoğan Yilmaz 2003; Johnston 2013b). These physical changes are in part due to fluid movement in the subsurface (David E. Lumley 1995b), as well as, geological changes due to compaction and expansion (P. J. Hatchell, Bourne, and Netherlands. 2005). These geomechanical effects change the position of the reflectors, the thickness of stratigraphy, and the physical properties such as density and wave velocity (J. Herwanger 2015).
Successful 4D applications rely on careful acquisition planning, closely matching the mismatch of the source (\(\Delta S\)) and receiver (\(\Delta R\)). This awareness has generally improved the repeatability of seismic acquisition; however, the nrms remains to be an essential measure of noise sources that deteriorate the 4D seismic analysis. Moreover, 4D seismic analysis has brought to light that some 3D seismic processing workflows are not as repeatable and amplitude-preserving as they were thought to be (David E. Lumley 2001). Modern processing flows include co-processing of the base and monitor seismic volumes with specialized tools to reduce differences from processing (Johnston 2013a).
The standard analysis tool in 4D seismic interpretation is amplitude differences (Johnston 2013b). Differences can among others stem from fluid movement or replacement, i.e. oil, gas, or brine, as well as, changes in the rock matrix due to compaction, temperature changes, and movement of injected CO2 plumes. Usually, a simple difference of the 3D seismic volumes will not yield satisfactory results due to small-scale fluctuations in both arrival times and amplitudes, making time-shift analysis a vital process to match the reflection events. These time-shift values are a valuable source of information themselves (S. A. Hall et al. 2002b; P. Hatchell, Bourne, and Netherlands 2005), considering their sole dependence on wavefield kinematics, time shifts tend to be a more robust measurement than amplitude differences (Johnston 2013b).
Considering normal incidence on a horizontal layer of thickness \(z\) and a P-wave velocity \(v\) with a traveltime \(t\), we can express the changes in traveltime as:
for homogeneous isotropic \(v\) and small changes in \(z\) and \(v\). Originally developed in P. Hatchell, Bourne, and Netherlands (2005), with a rigorous integral derivation presented in MacBeth, Mangriotis, and Amini (2019).
The vertical strain \(\frac{\Delta z}{z}\) directly relates to the geomechanical strain \(\xi_{zz}\), describing the vertical strain on the vertical surface of an infinitesimal element (J. Herwanger 2015). Independently P. Hatchell, Bourne, and Netherlands (2005) and Røste, Stovas, and Landrø (2006) developed a single-parameter solution to relate velocity changes and vertical strain
with \(R\) being the single parameter hbr-factor (P. J. Hatchell, Bourne, and Netherlands. 2005; MacBeth, Mangriotis, and Amini 2019). The hbr being a lithological constant, we can relate [eq:R] and [eq:timestrain] and obtain a direct relationship between the vertical strain \(\xi_{zz}\) and the time shift \(\Delta t\) for a given lithology with property \(R\)
Contingent on the assumption of zero-offset incidence, homogeneous velocity and isotropy, time-shift extraction is mostly performed in the z-direction by comparing traces directly. Prominently, the 1D windowed cross-correlation is used due to its computational speed and general lack of limiting underlying assumptions (J. E. Rickett and Lumley 2001). The main drawback of this method is, however, that the result is highly dependent on the window-size and susceptible to noise. Other methods for post-stack seismic time shift extraction include dtw (Hale2013?) and inversion-based approaches (J. Rickett, Duranti, Ramon, et al. 2007).
More recently, research into pre-stack time shift extraction and 3D-based methods has been conducted. These methods relax the constraints of some assumptions of 1D applications (Ghaderi and Landrø 2005; S. A. Hall et al. 2002b). 3D time shifts can capture the subsurface movement of reflectors and account for 3D effects of the \(\Delta R / \Delta S\) acquisition mismatch, which effect seismic illumination.
qi extends the interpretation of 4D changes to estimate fluid saturation and pressure changes within the reservoir. The subsurface changes recorded by the seismic data can be related numerically to subsurface changes. Tarantola (2005) defines the scientific procedure for the study of a physical system loosely as a three-step process involving parameterization of the system, forward modelling, and inverse modelling, additionally defining the inversion as the only deductive method. The inversion process is usually non-unique, where multiple causal processes could explain an observation. Therefore prior information can often be beneficial in applications such as Bayesian inversion. In 4D seismic data particularly, decoupling of pressure and saturation changes is non-trivial and relies on pre-stack or angle-stack information (Martin Landrø 2001b). This process is, however, highly desirable with the benefit of quantifying the subsurface changes from observed seismic data directly.
Active areas of research in 4D seismic are the use of 4D seismic data to estimate saturation and pressure changes quantitatively, however, these approaches often depend on reliable rock-physics models. Moreover, volumetric time-shift estimation as opposed to trace-wise time-shift extraction, is particularly beneficial to quantitative pre-stack seismic analysis. Additional research in extractive data-based methods and model-based approaches investigate how much information is available directly from the data and what information is available from the modelling feedback-loop.
Lately there has been an increased focus on using machine learning in 4D seismic and the wider field of geoscience. Many 4D seismic approaches depend on statistical methods, one example being time-shift extraction by trace-wise windowed cross-correlation, which lends itself to machine learning applications. The next chapter will give a detailed review of the use of machine learning in geoscience, while introducing important theoretical concepts for this thesis.
Machine Learning in Geoscience
In 11.2 a published peer-reviewed book chapter provides a treatment of the history and recent advancements and developments of machine learning in geoscience (Jesper Sören Dramsch 2020c). The book chapter covers the historical development of machine learning with a focus on co-developments with geoscience and provides the theoretical background for this thesis. 11.2.1.2 specifically gives a treatment of neural networks, the main driver of modern machine learning applications. 11.2.2.4 goes on to discuss the development of dl, with 11.2.2.6 going into detail about convolutional neural network architectures that are particularly relevant to both this thesis and the wider field of machine learning in geoscience.
Essential machine learning concepts that are used throughout this thesis will be introduced. This includes dnns and convolutional neural networks, as well as, common natural image benchmarks, i.e. ImageNet. Moreover, the convolutional neural networks architectures VGG-16 and ResNet are discussed, which are used in 13. This chapter goes on to discuss the U-Net architecture, which is at the core of the Voxelmorph algorithm discussed in 16. Moreover, 11.2 discusses composition of neural networks as applied to geoscience.
In addition svms, kriging and gps, and rfs are discussed as they are important machine learning models used in geoscience detailed in their respective sections. gps in particular have a rich history in geoscience, originating in geostatistics, having reached the wider machine learning community. These methods are particularly suitable for problems on smaller datasets, where neural networks would overfit on the dataset and not generalize to unseen data.
The review shows the use of modern machine learning software applications and discusses the necessity of thorough model validation. The machine learning applications in this thesis split the labelled data into subsets that are used for training and validation. This serves as a basic test of generalization of the individual machine learning model to unseen data.
Book Chapter: 70 years of machine learning in geoscience in review
In recent years machine learning has become an increasingly important interdisciplinary tool that has advanced several fields of science, such as biology (Ching et al. 2018), chemistry (Schütt et al. 2017b), medicine (D. Shen, Wu, and Suk 2017) and pharmacology (Kadurin et al. 2017). Specifically, the method of deep neural networks has found wide application. While geoscience was slower in the adoption, bibliometrics show the adoption of deep learning in all aspects of geoscience. Most subdisciplines of geoscience have been treated to a review of machine learning. Remote sensing has been an early adopter (Lary et al. 2016), with geomorphology (A. Valentine and Kalnins 2016), solid Earth geoscience (Bergen et al. 2019), hydrogeophysics (C. Shen 2018), seismology (Kong et al. 2019), seismic interpretation (Zhen Wang et al. 2018) and geochemistry (Zuo et al. 2019) following suite. Climate change, in particular, has received a thorough treatment of the potential impact of varying machine learning methods for modelling, engineering and mitigation to address the problem (Rolnick et al. 2019). This review addresses the development of applied statistics and machine learning in the wider discipline of geoscience in the past 70 years and aims to provide context for the recent increase in interest and successes in machine learning and its challenges [1].
Machine learning (ML) is deeply rooted in applied statistics, building computational models that use inference and pattern recognition instead of explicit sets of rules. Machine learning is generally regarded as a sub-field of artificial intelligence (AI), with the notion of AI first being introduced by Turing (1950). Samuel (1959) coined the term machine learning itself, with Mitchell and others (1997) providing a commonly quoted definition:
A computer program is said to learn from experience E with respect to some class of tasks T and performance measure P if its performance at tasks in T, as measured by P, improves with experience E.
Mitchell and others (1997)
This means that a machine learning model is defined by a combination of requirements. A task such as, classification, regression, or clustering is improved by conditioning of the model on a training data set. The performance of the model is measured with regard to a loss, also called metric, which quantifies the performance of a machine learning model on the provided data. In regression, this would be measuring the misfit of the data from the expected values. Commonly, the model improves with exposure to additional samples of data. Eventually, a good model generalizes to unseen data, which was not part of the training set, on the same task the model was trained to perform.
Accordingly, many mathematical and statistical methods and concepts, including Bayes’ rule (Bayes 1763), least-squares (Legendre 1805), and Markov models (Andrei Andreevich Markov 1906; Andrey Andreyevich Markov 1971), are applied in machine learning. Gaussian processes stand out as they originate in time series applications (Kolmogorov 1939) and geostatistics (Krige 1951), which roots this machine learning application in geoscience (C. E. Rasmussen 2003). "Kriging" originally applied two-dimensional Gaussian processes to the prediction of gold mine valuation and has since found wide application in geostatistics. Generally, Matheron (1963) is credited with formalizing the mathematics of kriging and developing it further in the following decades.
Between 1950 and 2020 much has changed. Computational resources are now widely available both as hardware and software, with high-performance compute being affordable to anyone from cloud computing vendors. High-quality software for machine learning is widely available through the free and open-source software movement, with major companies (Google, Facebook, Microsoft) competing for the usage of their open-source machine learning frameworks (Tensorflow, Pytorch, CNTK [2]) and independent developments reaching wide applications such as scikit-learn (F. Pedregosa et al. 2011) and xgboost (T. Chen and Guestrin 2016).
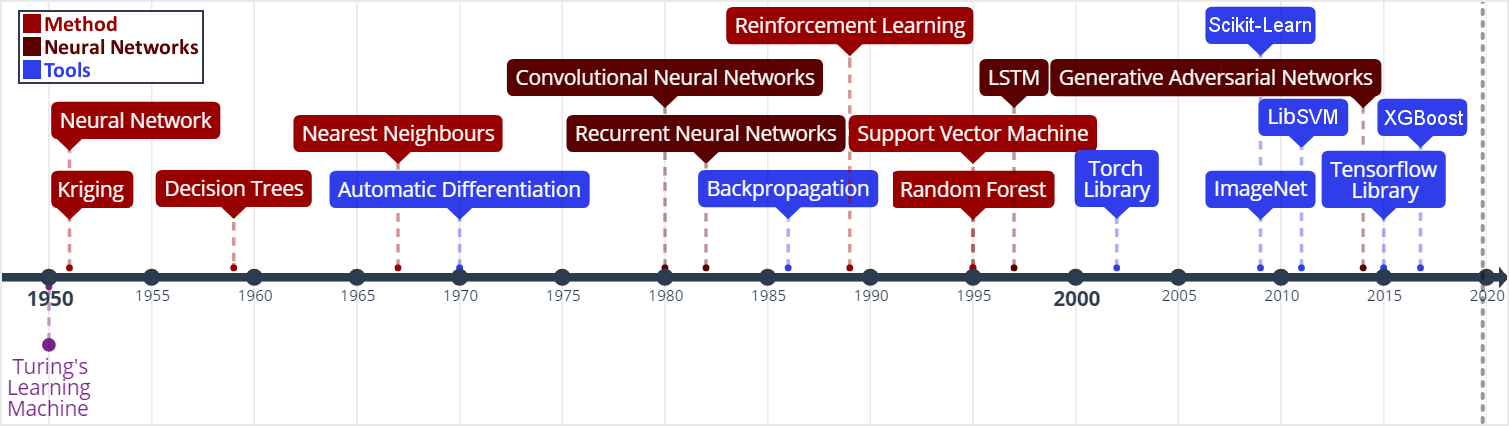
Machine Learning timeline from (Jesper Sören Dramsch 2019a). Neural Networks: (S. J. Russell and Norvig 2010); Kriging: (Krige 1951); Decision Trees: (Belson 1959); Nearest Neighbours: (Cover and Hart 1967); Automatic Differentiation: (Linnainmaa 1970); Convolutional Neural Networks: (Fukushima 1980; Y. LeCun, Bengio, and Hinton 2015); Recurrent Neural Networks: (Hopfield 1982); Backpropagation: (Kelley 1960; Bryson 1961; Dreyfus 1962; David E. Rumelhart et al. 1988); Reinforcement Learning: (Watkins 1989); Support Vector Machines: (Cortes and Vapnik 1995); Random Forests: (Ho 1995); LSTM: (Hochreiter and Schmidhuber 1997); Torch Library: (Collobert, Bengio, and Mariéthoz 2002); ImageNet: (Jia Deng et al. 2009); Scikit-Learn: (F. Pedregosa et al. 2011); LibSVM: (C.-C. Chang and Lin 2011); Generative Adversarial Networks: (I. Goodfellow et al. 2014a); Tensorflow: (Abadi et al. 2015a); XGBoost: (T. Chen and Guestrin 2016)
Nevertheless, investigations of machine learning in geoscience are not a novel development. The research into machine learning follows interest in artificial intelligence closely. Since its inception, artificial intelligence has experienced two periods of a decline in interest and trust, which has impacted negatively upon its funding. Developments in geoscience follow this wide-spread cycle of enthusiasm and loss of interest with a time lag of a few years. This may be the result of a variety of factors, including research funding availability and a change in willingness to publish results.
Historic Machine Learning in Geoscience
The 1950s and 1960s were decades of machine learning optimism, with machines learning to play simple games and perform tasks like route mapping. Intuitive methods like k-means, Markov models, and decision trees have been used as early as the 1960s in geoscience. K-means was used to describe the cyclicity of sediment deposits (Preston and Henderson 1964). Krumbein and Dacey (1969) give a thorough treatment of the mathematical foundations of Markov chains and embedded Markov chains in a geological context through application to sedimentological processes, which also provides a comprehensive bibliography of Markov processes in geology. Some selected examples of early applications of Markov chains are found in sedimentology (Schwarzacher 1972), well log analysis (Agterberg 1966), hydrology (Matalas 1967), and volcanology (Wickman 1968). Decision tree-based methods found early applications in economic geology and prospectivity mapping (Newendorp 1976; Reddy and Bonham-Carter 1991).
The 1970s were left with few developments in both the methods of machine learning, as well as, applications and adoption in geoscience (cf. Figure 11.1), due to the "first AI winter" after initial expectations were not met. Nevertheless, as kriging was not considered an AI technology, it was unaffected by this cultural shift and found applications in mining (Huijbregts and Matheron 1970), oceanography (Chiles and Chauvet 1975), and hydrology (Delhomme 1978). This was in part due to superior results over other interpolation techniques, but also the provision of uncertainty measures.
Expert Systems to Knowledge-Driven AI
The 1980s marked uptake in interest in machine learning and artificial intelligence through so-called "expert systems" and corresponding specialized hardware. While neural networks were introduced in 1950, the tools of automatic differentiation and backpropagation for error-correcting machine learning were necessary to spark their adoption in geophysics in the late 1980s. X. Zhao and Mendel (1988) performed seismic deconvolution with a recurrent neural network (Hopfield network). Dowla, Taylor, and Anderson (1990) discriminated between natural earthquakes and underground nuclear explosions using feed-forward neural networks. An ensemble of networks was able to achieve 97 % accuracy for nuclear monitoring. Moreover, the researchers inspected the network to gain the insight that the ratio of particular input spectra was beneficial to the discrimination of seismological events to the network. However, in practice the neural networks underperformed on uncurated data, which is often the case in comparison to published results. K. Y. Huang, Chang, and Yen (1990) presented work on self-organizing maps (also Kohonen networks), a special type of unsupervised neural network applied to pick seismic horizons. The field of geostatistics saw a formalization of theory and an uptake in interest with Matheron and others (1981) formalizing the relationship of spline-interpolation and kriging and Dubrule (1984) further develop the theory and apply it to well data. At this point, kriging is well-established in the mining industry as well as other disciplines that rely on spatial data, including the successful analysis and construction of the Channel tunnel (Chilès and Desassis 2018). The late 1980s then marked the second AI winter, where expensive machines tuned to run "expert systems" were outperformed by desktop hardware from non-specialist vendors, causing the collapse of a half-billion-dollar hardware industry. Moreover, government agencies cut funding in AI specifically.
The 1990s are generally regarded as the shift from a knowledge-driven to a data-driven approach in machine learning. The term AI and especially expert systems were almost exclusively used in computer gaming and regarded with cynicism and as a failure in the scientific world. In the background, however, with research into applied statistics and machine learning, this decade marked the inception of Support-Vector Machines (SVM) (Cortes and Vapnik 1995), the tree-based method Random Forests (RF) (Ho 1995), and a specific type of recurrent neural network (RNN) Long Short-Term Memories (LSTM) (Hochreiter and Schmidhuber 1997). SVMs were utilized for land usage classification in remote sensing early on (Hermes et al. 1999). Geophysics applied SVMs a few years later to approximate the Zoeppritz equations for AVO inversion, outperforming linearized inversion (Kuzma 2003). Random Forests, however, were delayed in broader adoption, due to the term "random forests" only being coined in 2001 (Breiman 2001) and the statistical basis initially being less rigorous and implementation being more complicated. LSTMs necessitate large amounts of data for training and can be expensive to train, after further development in 2011 (Ciresan et al. 2011) it gained popularity in commercial time series applications particularly speech and audio analysis.
Neural Networks
M. McCormack (1991) marks the first review of the emerging tool of neural networks in geophysics. The paper goes into the mathematical details and explores pattern recognition. The author summarizes neural network applications over the 30 years prior to the review and presents worked examples in automated well-log analysis and seismic trace editing. The review comes to the conclusion that neural networks are, in fact, good function approximators, taking over tasks that were previously reserved for human work. He criticizes slow training, the cost of retraining networks upon new knowledge, imprecision of outputs, non-optimal training results, and the black box property of neural networks. The main conclusion sees the implementation of neural networks in conventional computation and expert systems to leverage the pattern recognition of networks with the advantages of conventional computer systems.
Neural networks are the primary subject of the modern day machine learning interest, however, significant developments leading up to these successes were made prior to the 1990s. The first neural network machine was constructed by Minsky [described in S. J. Russell and Norvig (2010)] and soon followed by the "Perceptron", a binary decision boundary learner (Rosenblatt 1958). This decision was calculated as follows:
It describes a linear system with the output \(o\), the linear activation \(a\) of the input data \(x\), the index of the source \(i\) and target node \(j\), the trainable weights \(w\), the trainable bias \(b\) and a binary activation function \(\sigma\). The activation function \(\sigma\) in particular has received ample attention since its inception. During this period, a binary \(\sigma\) became uncommon and was replaced by non-linear mathematical functions. Neural networks are commonly trained by gradient descent, therefore, differentiable functions like sigmoid or tanh, allowing for the activation \({\color{cyan}o}\) of each neuron in a neural network to be continuous.
![Single layer neural network as described in equation `[eq:perceptron] <#eq:perceptron>`__. Two inputs :math:`x_i` are multiplied by the weights :math:`w_{ij}` and summed with the biases :math:`b_j`. Subsequently an activation function :math:`\sigma` is applied to obtain out outputs :math:`o_j`.](../images/shallow-nn.png)
Single layer neural network as described in equation [eq:perceptron]. Two inputs \(x_i\) are multiplied by the weights \(w_{ij}\) and summed with the biases \(b_j\). Subsequently an activation function \(\sigma\) is applied to obtain out outputs \(o_j\).
Deep learning (Dechter 1986) expands on this concept. It is the combination of multiple layers of neurons in a neural network. These deep networks learn representations with multiple levels of abstraction and can be expressed using equation [eq:perceptron] as input neurons to the next layer
![Deep multi-layer neural network as described inequation `[eq:deepnetwork] <#eq:deepnetwork>`__.](../images/deep-nn.png)
Deep multi-layer neural network as described in equation [eq:deepnetwork].
Röth and Tarantola (1994) apply these building blocks of multi-layered neural networks with sigmoid activation to perform seismic inversion. They successfully invert low-noise and noise-free data on small training data. The authors note that the approach is susceptible to errors at low signal-to-noise ratios and coherent noise sources. Further applications include electromagnetic subsurface localization (Poulton, Sternberg, and Glass 1992), magnetotelluric inversion via Hopfield neural networks (Y. Zhang and Paulson 1997), and geomechanical microfractures modelling in triaxial compression tests (Feng and Seto 1998).
![Sigmoid activation function (red) and derivative (blue) to train multi-layer Neural Network described in equation `[eq:deepnetwork] <#eq:deepnetwork>`__.](../images/act_sigmoid.png)
Sigmoid activation function (red) and derivative (blue) to train multi-layer Neural Network described in equation [eq:deepnetwork].
Kriging and Gaussian Processes
Cressie (1990) review the history of kriging, prompted by the uptake of interest in geostatistics. The author defines kriging as Best Linear Unbiased Prediction and reviews the historical co-development of disciplines. Similar concepts were developed with mining, meteorology, physics, plant and animal breeding, and geodesy that relied on optimal spatial prediction. Later, C. K. Williams (1998) provide a thorough treatment of Gaussian Processes, in the light of recent successes of neural networks.
An alternative method of putting a prior over functions is to use a Gaussian process (GP) prior over functions. This idea has been used for a long time in the spatial statistics community under the name of "kriging", although it seems to have been largely ignored as a general-purpose regression method.
Williams (1998)
Overall, Gaussian Processes benefit from the fact that a Gaussian distribution will stay Gaussian under conditioning. That means that we can use Gaussian distributions in this machine learning process and they will produce a smooth Gaussian result after conditioning on the training data. To become a universal machine learning model, Gaussian Processes have to be able to describe infinitely many dimensions. Instead of storing infinite values to describe this random process, Gaussian Processes go the path of describing a distribution over functions that can produce each value when required.
The multivariate distribution over functions \(p(x)\) is described by the Gaussian Process depends on mean a function \(\mu(x)\) and a covariance function \(k(x, x')\). It follows that choosing an appropriate mean and covariance function, also known as kernel, is essential. Very commonly, the mean function is chosen to be zero, as this simplifies some of the math. Therefore, data with a non-zero mean is commonly centered to comply with this assumption (Görtler, Kehlbeck, and Deussen 2019). Choosing an appropriate kernel for the machine learning task is one of the benefits of the Gaussian Process. The kernel is where expert knowledge can be incorporated into data, e.g. seasonality metereological data can be described by a periodic covariance function.
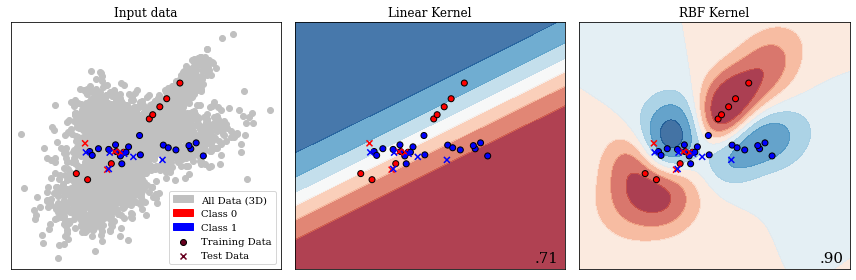
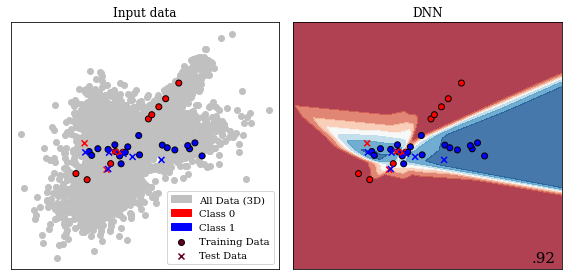
Gaussian Process separating two classes with different kernels. This image presents a 2D slice out of a 3D decision space. The decision boundary learnt from the data is visible, as well as the prediction in every location of the 2D slice. The two kernels presented are a linear kernel and a radial basis function (RBF) kernel, which show a significant discrepancy in performance. The bottom right number shows the accuracy on unseen test data. The linear kernel achieves \(71~\%\) accuracy, while the RBF kernel achieves \(90~\%\).
Figure 11.5 present a 2D slice of 3D data with two classes. This binary problem can be approached by applying a Gaussian Process to it. In the second panel, a linear kernel is shown, which predicts the data relatively poorly with an accuracy of \(71~\%\). A radial basis function (RBF) kernel, shown in the third panel generalizes to unseen test data with an accuracy of \(90~\%\). This figure shows how a trained Gaussian Process would predict any new data point presented to the model. The linear kernel would predict any data in the top part to be blue (Class 0) and any data in the bottom part to be red (Class 1). The RBF kernel, which we explore further in the subsection introducing support-vector machines, separates the prediction into four uneven quadrants. The choice of kernel is very important in Gaussian Processes and research into extracting specific kernels is ongoing (Duvenaud 2014).
In a more practical sense, Gaussian processes are computationally expensive, as an \(n\times n\) matrix must be inverted, with \(n\) being the number of samples. This results in a space complexity of \(\mathcal{O}(n^2)\) and a time complexity \(\mathcal{O}(n^3)\) (C. K. Williams and Rasmussen 2006). This makes Gaussian Processes most feasible for smaller data problems, which is one explanation for their rapid uptake in geoscience. An approximate computation of the inverted matrix is possible using the Conjugate Gradient (CG) optimization method, which can be stopped early with a maximum time cost of \(\mathcal{O}(n^3)\) (C. K. Williams and Rasmussen 2006). For problems with larger data sets, neural networks become feasible due to being computationally cheaper than Gaussian Processes, regularization on large data sets being viable, as well as, their flexibility to model a wide variety of functions and objectives. Regularization being essential as neural networks tend to not "overfit" and simply memorize the training data, instead of learning a generalizable relationship of the data. Interestingly, Hornik, Stinchcombe, and White (1989) showed that neural networks are a universal function approximator as the number of weights tend to infinity, and Neal (1996) were able to show that the infinitely wide stochastic neural network converges to a Gaussian Process. Oftentimes Gaussian Processes are trained on a subset of a large data set to avoid the computational cost. Gaussian Processes have seen successful application on a wide variety of problems and domains that benefit from expert knowledge.
The 2000s were opened with a review by Baan and Jutten (2000) recapitulating the most recent geophysical applications in neural networks. They went into much detail on the neural networks theory and the difficulties in building and training these models. The authors identify the following subsurface geoscience applications through history: First-break picking, electromagnetics, magnetotellurics, seismic inversion, shear-wave splitting, well log analysis, trace editing, seismic deconvolution, and event classification. They reveal a strong focus on exploration geophysics. The authors evaluated the application of neural networks as subpar to physics-based approaches and concluded that neural networks are too expensive and complex to be of real value in geoscience. This sentiment is consistent with the broader perception of artificial intelligence during this decade. Artificial intelligence and expert systems over-promised human-like performance, causing a shift in focus on research into specialized sub-fields, e.g. machine learning, fuzzy logic, and cognitive systems.
Contemporary Machine Learning in Geoscience
Mjolsness and DeCoste (2001) review machine learning in a broader context outside of exploration geoscience. The authors discuss recent successes in applications of remote sensing and robotic geology using machine learning models. They review graphical models, (hidden) Markov models, and SVMs and go on to disseminate the limitations of applications to vector data and poor performance when applied to rich data, such as graphs and text data. Moreover, the authors from NASA JPL go into detail on pattern recognition in automated rovers to identify geological prospects on Mars. They state:
The scientific need for geological feature catalogs has led to multiyear human surveys of Mars orbital imagery yielding tens of thousands of cataloged, characterized features including impact craters, faults, and ridges.
Mjolsness and DeCoste (2001)
The review points out the profound impact SVMs have on identifying geomorphological features without modelling the underlying processes.
Modern Machine Learning Tools
This decade of the 2000s introduces a shift in tooling, which is a direct contributor to the recent increase in adoption and research of both shallow and deep machine learning research.
Machine Learning software has been primarily comprised of proprietary software like Matlabwith the Neural Networks Toolbox and Wolfram Mathematicaor independent university projects like the Stuttgart Neural Network Simulator (SNNS). These tools were generally closed source and hard or impossible to extend and could be difficult to operate due to limited accompanying documentation. Early open-source projects include WEKA (Witten, Frank, and Hall 2005), a graphical user interface to build machine learning and data mining projects. Shortly after that, LibSVM was released as free open-source software (FOSS) (C.-C. Chang and Lin 2011), which implements support vector machines efficiently. It is still used in many other libraries to this day, including WEKA (C.-C. Chang and Lin 2011). Torch was then released in 2002, which is a machine learning library with a focus on neural networks. While it has been discontinued in its original implementation in the programming language Lua (Collobert, Bengio, and Mariéthoz 2002), PyTorch, the reimplementation in the programming language Python, is one of the leading deep learning frameworks at the time of writing (Paszke et al. 2017). In 2007, the libraries Theano and scikit-learn were released openly licensed in Python (Team 2016; F. Pedregosa et al. 2011). Theano is a neural network library that was a tool developed at the Montreal Institute for Learning Algorithms (MILA) and ceased development in 2017 after strong industrial developers had released openly licensed deep learning frameworks. Scikit-learn implements many different machine learning algorithms, including SVMs, Random Forests and single-layer neural networks, as well as utility functions including cross-validation, stratification, metrics and train-test splitting, necessary for robust machine learning model building and evaluation.
Support-Vector Machines
The impact of scikit-learn has shaped the current machine learning
software package by implementing a unified application programming
interface (API) (Buitinck et al. 2013). This API is explored by example
in the following code snippets, the code can be obtained at Jesper
Soeren Dramsch (2020b). First, we generate a classification dataset
using a utility function. The make_classification function takes
different arguments to adjust the desired arguments, we are generating
5000 samples (n_samples) for two classes, with five features
(n_features), of which three features are actually relevant to the
classification (n_informative). The data is stored in \(X\),
whereas the labels are contained in \(y\).
# Generate random classification dataset for example from sklearn.datasets import make_classification X, y = make_classification(n_samples=5000, n_features=5, n_informative=3, n_redundant=0, random_state=0, shuffle=False)
It is good practice to divide the available labeled data into a training
data set and a validation or test data set. This split ensures that
models can be evaluated on unseen data to test the generalization to
unseen samples. The utility function train_test_split takes an
arbitrary amount of input arrays and separates them according to
specified arguments. In this case 25% of the data are kept for the
hold-out validation set and not used in training. The random_state
is fixed to make these examples reproducible.
# Split data into train and validation set from sklearn.model_selection import train_test_split X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=.25, random_state=0)
Then we need to define a machine learning model, considering the
previous discussion of high impact machine learning models, the first
example is an SVM classifier. This example uses the default values for
hyperparameters of the SVM classifier, for best results on real-world
problems these have to be adjusted. The machine learning training is
always done by calling classifier.fit(X, y) on the classifier
object, which in this case is the SVM object. In more detail, the
.fit() method implements an optimization loop that will condition
the model to the training data by minimizing the defined loss function.
In the case of the SVM classification the parameters are adjusted to
optimize a hinge loss, outlined in
equation [eq:hingeloss]. The trained model
scikit-learn model contains information about all its hyperparameters in
addition to the trained model, shown below. The exact meaning of all
these hyperparameters is laid out in the scikit-learn documentation
(Buitinck et al. 2013).
# Define and train a Support Vector Machine Classifier from sklearn.svm import SVC svm = SVC(random_state=0) svm.fit(X_train, y_train) >>> SVC(C=1.0, break_ties=False, cache_size=200, class_weight=None, coef0=0.0, degree=3, decision_function_shape='ovr', gamma='scale', kernel='rbf', max_iter=-1, probability=False, random_state=0, shrinking=True, tol=0.001, verbose=False)
The trained SVM can the be used to predict on new data, by calling
classifier.predict(data) on the trained classifier object. The new
data has to contain four features like the training data did. Generally,
machine learning models always need to be trained on the same set of
input features as the data available for prediction. The .predict()
method outputs the most likely estimate on the new data to generate
predictions. In the following code snippet, three predictions on three
input vectors are performed on the previously trained model.
# Predict on new data with trained SVM print(svm.predict([[0, 0, 0, 0, 0], [-1, -1, -1, -1, -1], [1, 1, 1, 1, 1]])) >>> [1 0 1]
The blackbox model should be evaluated with the classifier.score()
function. Evaluating the performance on the training data set gives an
indication how well the model is performing, but this is generally not
enough to gauge the performance of machine learning models. In addition,
the trained model has to be evaluated on the hold-out set, a dataset the
model has not been exposed to during training. This avoids that the
model only performs well on the training data by "memorization" instead
of extracting meaningful generalizable relationships, an effect called
overfitting. In this example the hyperparameters are left to the default
values, in real-life applications hyperparameters are usually adjusted
to build better models. This can lead to an addition meta-level of
overfitting on the hold-out set, which necessitates an additional third
hold-out set to test the generalizability of the trained model with
optimized hyperparameters. The default score uses the class accuracy,
which suggests our model is approximately 90% correct. Similar train and
test scores indicate that the model learned a generalizable model,
enabling prediction on unseen data without a performance loss. Large
differences between the training score and test score indicate either
overfitting, in the case of a better training score. A higher test score
than training score can be an indication of a deeper problem with the
data split, scoring, class imbalances, and needs to be investigated by
means of external cross-validation, building standard "dummy" models,
independence tests, and further manual investigations.
# Score SVM on train and test data print(svm.score(X_train, y_train)) print(svm.score(X_test, y_test)) >>> 0.9098666666666667 >>> 0.9032
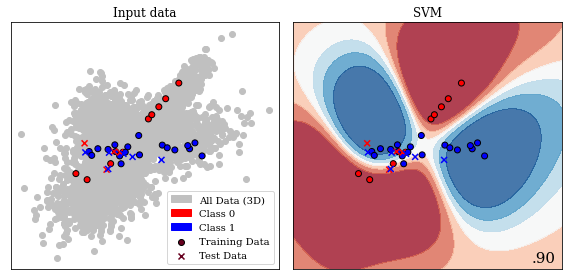
Example of Support Vector Machine separating two classes, showing the decision boundary learnt from the data. The data contains three informative features, the decision boundary is therefore three dimensional, shown is a central slice of data points in 2D. (A video is available at (Jesper Soeren Dramsch 2020a))
Support-vector machines can be employed for each class of machine learning problem, i.e. classification, regression, and clustering. In a two-class problem, the algorithm considers the \(n\)-dimensional input and attempts to find a \((n-1)\)-dimensional hyperplane that separates these input data points. The problem is trivial if the two classes are linearly separable, also called a hard margin. The plane can pass the two classes of data without ambiguity. For data with an overlap, which is usually the case, the problem becomes an optimization problem to fit the ideal hyperplane. The hinge loss provides the ideal loss function for this problem, yielding 0 if none of the data overlap, but a linear residual for overlapping points that can be minimized:
with \(y_i\) being the current target label and \(\vec{w}\cdot \vec{x}_i - b\) being the hyperplane under consideration. The hyperplane consists of \(w\) the normal vector and point \(x\), with the offset \(b\). This leads the algorithm to optimize
with \(\lambda\) being a scaling factor. For small \(\lambda\) the loss becomes the hard margin classifier for linearly separable problems. The nature of the algorithm dictates that only values for \(\vec{x}\) close to the hyperplane define the hyperplane itself; these values are called the support vectors.
The SVM algorithm would not be as successful if it were simply a linear classifier. Some data can become linearly separable in higher dimensions. This, however, poses the question of how many dimensions should be searched, because of the exponential cost in computation that follows due to the increase of dimensionality (also known as the curse of dimensionality). Instead, the "kernel trick" was proposed (Aizerman 1964), which defines a set of values that are applied to the input data simply via the dot product. A common kernel is the radial basis function (RBF), which is also the kernel we applied in the example. The kernel is defined as:
This specifically defines the Gaussian Radial Basis Function of every input data point with regard to a central point. This transformation can be performed with other functions (or kernels), such as, polynomials or the sigmoid function. The RBF will transform the data according to the distance between \(x_i\) and \(X_j\), this can be seen in Figure 11.7. This results in the decision surface in Figure 11.6 consisting of various Gaussian areas. The RBF is generally regarded as a good default, in part, due to being translation invariant (i.e. stationary) and smoothly varying.
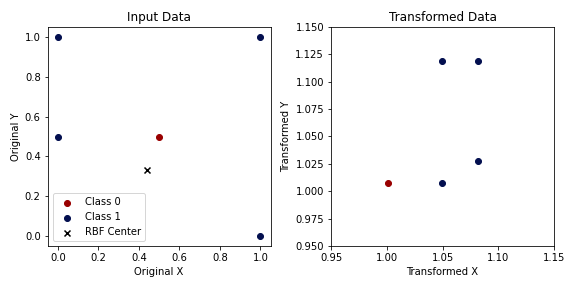
Samples from two classes that are not linearly separable input data (left). Applying a Gaussian Radial Basis Function centered around \((0.4, 0.33)\) with \(\lambda = .5\) results in the two classes being linearly separable.
An important topic in machine learning is explainability, which inspects
the influence of input variables on the prediction. We can employ the
utility function permutation_importance to inspect any model and how
they perform with regard to their input features (Breiman 2001). The
permutation importance evaluates how well the blackbox model performs,
when a feature is not available. Practically, a feature is replaced with
random noise. Subsequently, the score is calculated, which provides a
representation how informative a feature is compared to noise. The data
we generated in the first example contains three informative features
and two random data columns. The mean values of the calculated
importances show that three features are estimated to be three
magnitudes more important, with the second feature containing the
maximum amount of information to predict the labels.
# Calculate permutation importance of SVM model from sklearn.inspection import permutation_importance importances = permutation_importance(svm, X_train, y_train, n_repeats=10, random_state=0) # Show mean value of importances and the ranking print(importances.importances_mean) print(importances.importances_mean.argsort()) >>> [ 2.1787e-01 2.8712e-01 1.2293e-01 -1.8667e-04 7.7333e-04] >>> [3 4 2 0 1]
Support-vector machines were applied to seismic data analysis (J. Li and Castagna 2004) and the automatic seismic interpretation (Yexin Liu et al. 2015; H. Di, Shafiq, and AlRegib 2017b; Mardan, Javaherian, and others 2017). Compared to convolutional neural networks, these approaches usually do not perform as well, when the convolutional neural network can gain information from adjacent samples. Seismological volcanic tremor classification (Masotti et al. 2006, 2008) and analysis of ground-penetrating radar (E. Pasolli, Melgani, and Donelli 2009; X. Xie et al. 2013) were other notable applications of SVM in Geoscience. The 2016 Society of Exploration Geophysicists (SEG) machine learning challenge was held using a SVM baseline (B. Hall 2016). Several other authors investigated well log analysis (F. Anifowose, Ayadiuno, and Rashedian 2017a; Antoine Caté et al. 2018; Gupta et al. 2018; Saporetti et al. 2018), as well as seismology for event classification (Malfante et al. 2018) and magnitude determination (Ochoa, Niño, and Vargas 2018). These rely on SVMs being capable of regression on time-series data. Generally, many applications in geoscience have been enabled by the strong mathematical foundation of SVMs, such as microseismic event classification (Z. Zhao and Gross 2017), seismic well ties (Chaki, Routray, and Mohanty 2018), landslide susceptibility (Marjanović et al. 2011; Ballabio and Sterlacchini 2012), digital rock models (Ma et al. 2012), and lithology mapping (Cracknell and Reading 2013).
Random Forests
The following example shows the application of Random Forests, to illustrate the similarity of the API for different machine learning algorithms in the scikit-learn library. The Random Forest classifier is instantiated with a maximum depth of seven, and the random state is fixed to zero again. Limiting the depth of the forest forces the random forest to conform to a simpler model. Random forests have the capability to become highly complex models that are very powerful predictive models. This is not conducive to this small example dataset, but easy to modify for the inclined reader. The classifier is then trained using the same API of all classifiers in scikit-learn. The example shows a very high number of hyperparameters, however, Random Forests work well without further optimization of these.
# Define and train a Random Forest Classifier from sklearn.ensemble import RandomForestClassifier rf = RandomForestClassifier(max_depth=7, random_state=0) rf.fit(X_train, y_train) >>> RandomForestClassifier(bootstrap=True, ccp_alpha=0.0, class_weight=None, criterion='gini', max_depth=7, max_features='auto', max_leaf_nodes=None, max_samples=None, min_impurity_decrease=0.0, min_impurity_split=None, min_samples_leaf=1, min_samples_split=2, min_weight_fraction_leaf=0.0, n_estimators=100, n_jobs=None, oob_score=False, random_state=0, verbose=0, warm_start=False)
The prediction of the random forest is performed in the same API call again, also consistent with all classifiers available. The values are slightly different from the prediction of the SVM.
# Predict on new data with trained Random Forest print(rf.predict([[0, 0, 0, 0, 0], [-1, -1, -1, -1, -1], [1, 1, 1, 1, 1]])) >>> [1 0 1]
The training score of the random forest model is 2.5 % better than the SVM in this instance, this score however not informative. Comparing the test scores shows only a 0.88 % difference, which is the relevant value to evaluate, as it shows the performance of a model on data it has not seen during the training stage. The random forest performed slightly better on the training set than the test data set. This slight discrepancy is usually not an indicator of an overfit model. Overfit models "memorize" the training data and do not generalize well, which results in poor performance on unseen data. Generally, overfitting is to be avoided in real application, but can be seen in competitions, on benchmarks, and show-cases of new algorithms and architectures to oversell the improvement over state-of-the-art methods (Recht et al. 2019).
# Score Random Forest on train and test data print(rf.score(X_train, y_train)) print(rf.score(X_test, y_test)) >>> 0.9306 >>> 0.912
Random forests have specialized methods available for introspection, which can be used to calculate feature importance. These are based on the decision process the random forest used to build the machine learning model. The feature importance in Random Forests uses the same method as permutation importance, which is dropping out features to estimate their importance on the model performance. Random Forests use a measure to determine the split between classes at each node of the trees called Gini impurity. While the permutation importance uses the accuracy score of the prediction, in Random Forests this Gini impurity can be used to measure how informative a feature is in a model. It is important to note that this impurity-based process can be susceptible to noise and overestimate high number of classes in features. Using the permutation importance instead is a valid choice. In this instance as opposed to the permutation importance, the random forest estimates the two non-informative features to be one magnitude less useful than the informative features, instead of two magnitudes.
# Inspect random forest for feature importance print(rf.feature_importances_) print(rf.feature_importances_.argsort()) >>> [0.2324 0.4877 0.2527 0.0141 0.0129] >>> [4 3 0 2 1]
Random forests and other tree-based methods, including gradient boosting, a specialized version of random forests, have generally found wider application with the implementation into scikit-learn and packages for the statistical languages R and SPSS. Similar to neural networks, this method is applied to ASI (Guillen et al. 2015) with limited success, which is due to the independent treatment of samples, like SVMs. Random forests have the ability to approximate regression problems and time series, which made them suitable for seismological applications including localization (Dodge and Harris 2016), event classification in volcanic tremors (Maggi et al. 2017) and slow slip analysis (Hulbert et al. 2018). They have also been applied to geomechanical applications in fracture modelling (Valera et al. 2017) and fault failure prediction (Rouet-Leduc et al. 2017, 2018), as well as, detection of reservoir property changes from 4D seismic data (Cao and Roy 2017). Gradient Boosted Trees were the winning models in the 2016 SEG machine learning challenge (M. Hall and Hall 2017) for well-log analysis, propelling a variety of publications in facies prediction (Bestagini, Lipari, and Tubaro 2017; Blouin et al. 2017; Antoine Caté et al. 2018; Saporetti et al. 2018).
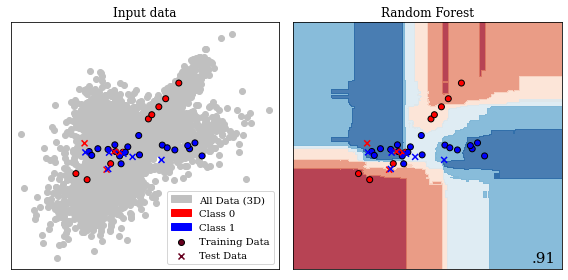
Binary Decision Boundary for Random Forest in 2D. This is the same central slice of the 3D decision volume used in Figure 11.6.
Furthermore, various methods that have been introduced into scikit-learn have been applied to a multitude of geoscience problems. Hidden Markov models were used on seismological event classification (Ohrnberger 2001; Beyreuther and Wassermann 2008; Bicego, Acosta-Muñoz, and Orozco-Alzate 2013), well-log classification (Jeong et al. 2014; H. Wang et al. 2017), and landslide detection from seismic monitoring (Dammeier et al. 2016). These hidden Markov models are highly performant on time series and spatially coherent problems. The "hidden" part of Markov models enables the model to assume influences on the predictions that are not directly represented in the input data. The K-nearest neighbours method has been used for well-log analysis (A. Caté et al. 2017; Saporetti et al. 2018), seismic well ties (K. Wang, Lomask, and Segovia 2017) combined with dynamic time warping and fault extraction in seismic interpretation (D. Hale 2013), which is highly dependent on choosing the right hyperparameter k. The unsupervised k-NN equivalent, k-means has been applied to seismic interpretation (H. Di, Shafiq, and AlRegib 2017a), ground motion model validation (Khoshnevis and Taborda 2018), and seismic velocity picking (Wei et al. 2018). These are very simple machine learning models that are useful for baseline models. Graphical modelling in the form of Bayesian networks has been applied to seismology in modelling earthquake parameters (Kuehn, Riggelsen, and others 2011), basin modelling (Martinelli et al. 2013), seismic interpretation (Ferreira et al. 2018) and flow modelling in discrete fracture networks (Karra et al. 2018). These graphical models are effective in causal modelling and gained popularity in modern applications of machine learning explainability, interpretability, and generalization in combination with do-calculus (Pearl 2012).
Modern Deep Learning
The 2010s marked a renaissance of deep learning and particularly convolutional neural networks. The convolutional neural network (CNN) architecture AlexNet (Krizhevsky, Sutskever, and Hinton 2012c) was the first convolutional neural network to enter the ImageNet challenge (Jia Deng et al. 2009). The ImageNet challenge is considered a benchmark competition and database of natural images established in the field of computer vision. This improved the classification error rate from 25.8 % to 16.4 % (top-5 accuracy). This has propelled research in convolutional neural networks, resulting in error rates on ImageNet of 2.25 % on top-5 accuracy in 2017 (Russakovsky et al. 2015). The Tensorflow library (Abadi et al. 2015a) was introduced for open source deep learning models, with some different software design compared to the Theano and Torch libraries.
The following example shows an application of deep learning to the data presented in the previous examples. The classification data set we use has independent samples, which leads to the use of simple densely connected feed-forward networks. Image data or spatially correlated datasets would ideally be fed to a convolutional neural network (CNN), whereas time series are often best approached with recurrent neural networks (RNN). This example is written using the Tensorflow library. PyTorch would be an equally good library to use.
All modern deep learning libraries take a modular approach to building deep neural networks that abstract operations into layers. These layers can be combined into input and output configurations in highly versatile and customizable ways. The simplest architecture, which is the one we implement below, is a sequential model, which consists of one input and one output layer, with a "stack" of layers. It is possible to define more complex models with multiple inputs and outputs, as well as the branching of layers to build very sophisticated neural network pipelines. These models are called functional API and subclassing API, but would not be conducive to this example.
The example model consists of Dense layers and a Dropout layer, which
are arranged in sequence. Densely connected layers contain a specified
number of neurons with an appropriate activation function, shown in the
example below. Each neuron performs the calculation outlined in
equation [eq:perceptron], with \(\sigma\)
defining the activation. Modern neural networks rarely implement
sigmoid and tanh activations anymore. Their activation
characteristic leads them to lose information for large positive and
negative values of the input, commonly called saturation(Hochreiter et
al. 2001). This saturation of neurons prevented good deep neural network
performance until new non-linear activation functions took their
place(Xu et al. 2015). The activation function Rectified linear unit
(ReLU) is generally credited with facilitating the development of very
deep neural networks, due to their non-saturating properties (Hahnloser
et al. 2000). It sets all negative values to zero and provides a linear
response for positive values, as seen in
equation [eq:relu]. Since it’s inception, many more
rectifiers with different properties have been introduced.
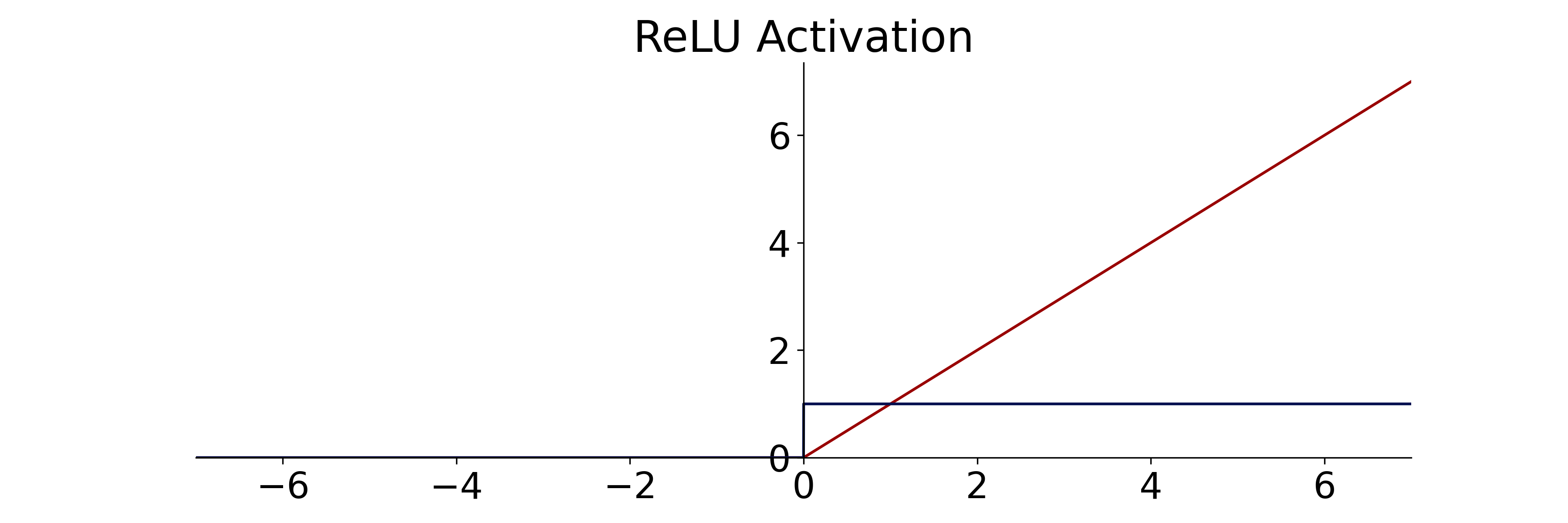
ReLU activation (red) and derivative (blue) for efficient gradient computation.
The other activation function used in the example is the "softmax" function on the output layer. This activation is commonly used for classification tasks, as it normalizes all activations at all outputs to one. It achieves this by applying the exponential function to each of the outputs in \({\color{red}\vec{a}}\) for class \(C\) and dividing that value by the sum of all exponentials:
The example additionally uses a Dropout layer, which is a common layer used for regularization of the network by randomly setting a specified percentage of nodes to zero for each iteration. Neural networks are particularly prone to overfitting, which is counteracted by various regularization techniques that also include input-data augmentation, noise injection, \(\mathcal{L}_1\) and \(\mathcal{L}_2\) constraints, or early-stopping of the training loop (I. Goodfellow, Bengio, and Courville 2016a). Modern deep learning systems may even leverage noisy student-teacher networks for regularization (Q. Xie et al. 2019).
import tensorflow as tf model = tf.keras.models.Sequential([ tf.keras.layers.Dense(32, activation='relu'), tf.keras.layers.Dropout(.3), tf.keras.layers.Dense(16, activation='relu'), tf.keras.layers.Dense(2, activation='softmax')])
These sequential models are also used for simple image classification models using convolutional neural networks. Instead of Dense layers, these are built up with convolutional layers, which are readily available in 1D, 2D, and 3D as Conv1D, Conv2D and Conv3D respectively. A two-dimensional convolutional neural network learns a so-called filter \(f\) for the \(n\times m\)-dimensional image \(G\), expressed as:
resulting in the central result \(G^{*}\) around the central coordinate \(c\). In convolutional neural networks each layer learns several of these filters \(f\), usually following by a down-sampling operation in \(n\) and \(m\) to compress the spatial information. This serves as a forcing function to learn increasingly abstract representations in subsequent convolutional layers.
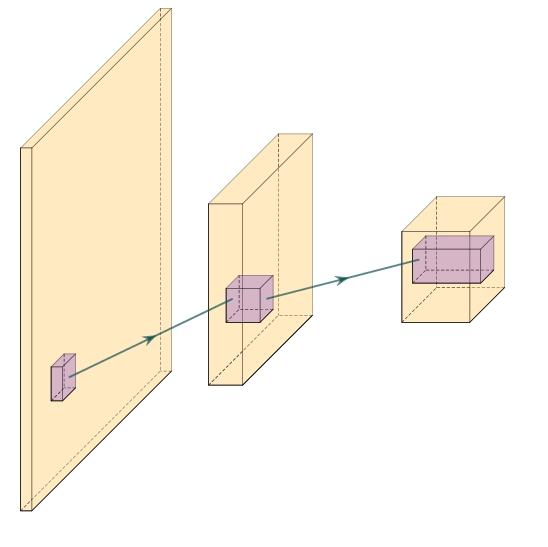
Three layer convolutional network. The input image (yellow) is convolved with several filters or kernel matrices (purple). Commonly, the convolution is used to downsample an image in the spatial dimension, while expanding the dimension of the filter response, hence expanding in "thickness" in the schematic. The filters are learned in the machine learning optimization loop. The shared weights within a filter improve efficiency of the network over classic dense networks.
This sequential example model of densely connected layers with a single input, 32, 16, and two neurons contains a total of 754 trainable weights. Initially, each of these weights is set to a pseudo-random value, which is often drawn from a distribution beneficial to fast training. Consequently, the data is passed through the network, and the result is numerically compared to the expected values. This form of training is defined as supervised training and error-correcting learning, which is a form of Hebbian learning. Other forms of learning exist and are employed in machine learning, e.g. competitive learning in self-organizing maps.
In regression problems the error is often calculated using the Mean Absolute Error (MAE) or Mean Squared Error (MSE), the \(\mathcal{L}_1\) shown in equation [eq:mae] and the \(\mathcal{L}_2\) norm shown in equation [eq:mse] respectively. Classification problems form a special type of problem that can leverage a different kind of loss called cross-entropy (CE). The cross-entropy is dependent on the true label \(y\) and the prediction in the output layer.
Many machine learning data sets have one true label \(y_{true} = 1\) for class \(C_{j = true}\), leaving all other \(y_j = 0\). This makes the sum over all labels obsolete. It is debatable how much binary labels reflects reality, but it simplifies equation [eq:crossentropy] to minimizing the (negative) logarithm of the neural network output \({\color{cyan}o_{j}}\), also known as negative log-likelihood:
Technically, the data we generated is a binary classification problem, and this means we could use the sigmoid activation function in the last layer and optimize a binary CE. This can speed up computation, but in this example, an approach is shown that works for many other problems and can therefore be applied to the readers data.
model.compile(optimizer='adam', # Often 'adam' or 'sgd' are good loss='sparse_categorical_crossentropy', metrics=['accuracy']) # Monitor other metrics
Large neural networks can be extremely costly to train with significant developments in 2019/2020 reporting multi-billion parameter language models (Google, OpenAI) trained on massive hardware infrastructure for weeks with a single epoch taking several hours. This calls for validation on unseen data after every epoch of the training run. Therefore, neural networks, like all machine learning models, are commonly trained with two hold-out sets, a validation and a final test set. The validation set can be provided or be defined as a percentage of the training data, as shown below. In the example, 10% of the training data are held out for validation after every epoch, reducing the training data set from 3750 to 3375 individual samples.
model.fit(X_train, y_train, validation_split=.1, epochs=100) >>> [...] Epoch 100/100 3375/3375 [==============================] - 0s 66us/sample loss: 0.1567 - accuracy: 0.9401 - val_loss: 0.1731 - val_accuracy: 0.9359
Neural networks are trained with variations of stochastic gradient descent (SGD), an incremental version of the classic steepest descent algorithm. We use the Adam optimizer, a variation of SGD that converges fast, but a full explanation would go beyond the scope of this chapter. The gist of the Adam optimizer is that it maintains a per-parameter learning rate of the first statistical moment (mean). This is beneficial for sparse problems and the second moment (uncentered variance), which is beneficial for noisy and non-stationary problems (Diederik P. Kingma and Ba 2014). The main alternative to Adam is SGD with Nesterov momentum (Sutskever et al. 2013), an optimization method that models conjugate gradient methods (CG) without the heavy computation that comes with the search in CG. SGD anecdotally finds a better optimal point for neural networks than Adam but converges much slower.
In addition to the loss value, we display the accuracy metric. While
accuracy should not be the sole arbiter of model performance, it gives a
reasonable initial estimate, how many samples are predicted correctly
with a percentage between zero and one. As opposed to scikit-learn, deep
learning models are compiled after their definition to make them fit for
optimization on the available hardware. Then the neural network can be
fit like the SVM and Random Forest models before, using the X_train
and y_train data. In addition, a number of epochs can be provided to
run, as well as other parameters that are left on default for the
example. The amount of epochs defines how many cycles of optimization on
the full training data set are performed. Conventional wisdom for neural
network training is that it should always learn for more epochs than
machine learning researchers estimate initially.
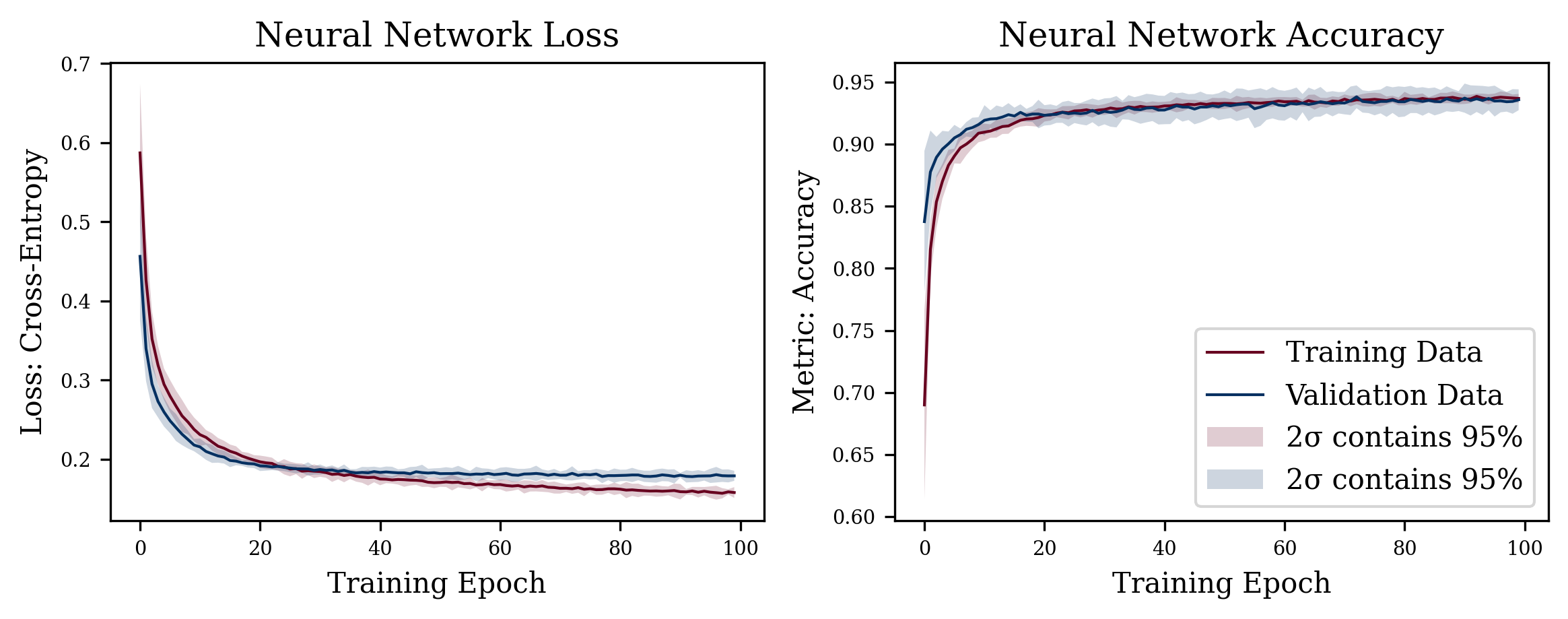
Loss and Accuracy of example neural network on ten random initializations. Training for 100 epochs with the shaded area showing the 95% confidence intervals of the loss and metric. Analyzing loss curves is important to evaluate overfitting. The trining loss decreasing, while validation loss is close to plateauing is a sign of overfitting. Generally, it can be seen that the model converged and is only making marginal gains with the risk of overfitting.
It can be difficult to fix all sources of randomness and stochasticity in neural networks, to make both research and examples reproducible. This example does not fix these so-called random seeds as it would detract from the example. That implies that the results for loss and accuracy will differ from the printed examples. In research fixing the seed is very important to ensure reproducibility of claims. Moreover, to avoid bad practices or so-called "lucky seeds", a statistical analysis of multiple fixed seeds is good practice to report results in any machine learning model.
model.evaluate(X_test, y_test) >>> 1250/1250 [==============================] - 0s 93us/sample loss: 0.1998 - accuracy: 0.9360 [0.19976349686831235, 0.936]
In the example before, the SVM and Random Forest classifier were scored on unseen data. This is equally important for neural networks. Neural networks are prone to overfit, which we try to circumvent by regularizing the weights and by evaluating the final network on an unseen test set. The prediction on the test set is very close to the last epoch in the training loop, which is a good indicator that this neural network generalizes to unseen data. Moreover, the loss curves in figure 11.11 do not converge too fast, while converging. However, it appears that the network would overfit if we let training continue. The exemplary decision boundary in figure 11.12 very closely models the local distribution of the data, which is true for the entire decision volume (Jesper Soeren Dramsch 2020a).
Central 2D slice of decision Boundary of deep neural network in trained on data with 3 informative features. The 3D volume is available in (Jesper Soeren Dramsch 2020a).
These examples illustrate the open source revolution in machine learning
software. The consolidated API and utility functions make it seem
trivial to apply various machine learning algorithms to scientific data.
This can be seen in the recent explosion of publications of applied
machine learning in geoscience. The need to be able to implement
algorithms has been replaced by merely installing a package and calling
model.fit(X, y). These developments call for strong validation
requirements of models to ensure valid, reproducible, and scientific
results. Without this careful validation these modern day tools can be
severely misused to oversell results and even come to incorrect
conclusions.
In aggregate, modern-day neural networks benefit from the development of non-saturating non-linear activation functions. The advancements of stochastic gradient descent with Nesterov momentum and the Adam optimizer (following AdaGrad and RMSProp) was essential faster training of deep neural networks. The leverage of graphics hardware available in most high-end desktop computers that is specialized for linear algebra computation, further reduced training times. Finally, open-source software that is well-maintained, tested, and documented with a consistent API made both shallow and deep machine learning accessible to non-experts.
Neural Network Architectures
In deep learning, implementation of models is commonly more complicated than understanding the underlying algorithm. Modern deep learning makes use of various recent developments that can be beneficial to the data set it is applied to, without specific implementation details results are often not reproducible. However, the machine learning community has a firm grounding in openness and sharing, which is seen in both publications and code. New developments are commonly published alongside their open-source code, and frequently with the trained networks on standard benchmark data sets. This facilitates thorough inspection and transferring the new insights to applied tasks such as geoscience. In the following, some relevant neural network architectures and their application are explored.
Convolutional Neural Network Architectures
![Schematic of a VGG16 network for ImageNet. The input data is convolved and down-sampled repeatedly. The final image classification is performed by flattening the image and feeding it to a classic feed-forward densely connected neural network. The 1000 output nodes for the 1000 ImageNet classes are normalized by a final softmax layer (cf. equation `[eq:softmax] <#eq:softmax>`__). Visualization library (Iqbal 2018)](../images/vgg16.png)
Schematic of a VGG16 network for ImageNet. The input data is convolved and down-sampled repeatedly. The final image classification is performed by flattening the image and feeding it to a classic feed-forward densely connected neural network. The 1000 output nodes for the 1000 ImageNet classes are normalized by a final softmax layer (cf. equation [eq:softmax]). Visualization library (Iqbal 2018)
The first model to discuss is the VGG-16 model, a 16-layer deep convolutional neural network (Simonyan and Zisserman 2014a) represented in figure 11.13. This network was an attempt at building even deeper networks and uses small \(3\times3\) convolutional filters in the network, called \(f\) in equation [eq:convolution]. This small filter-size was sufficient to build powerful models that abstract the information from layer to deeper layer, which is easy to visualize and generalize well. The trained model on natural images also transfers well to other domains like seismic interpretation (Jesper Sören Dramsch and Lüthje 2018b). Later, the concept of Network-in-Network was introduced, which suggested defined sub-networks or blocks in the larger network structure (M. Lin, Chen, and Yan 2013). The ResNet architecture uses this concept of blocks to define residual blocks. These use a shortcut around a convolutional block (K. He et al. 2016) to achieve neural networks with up to 152 layers that still generalize well. ResNets and residual blocks, in particular, are very popular in modern architectures including the shortcuts or skip connections they popularized, to address the following problem:
When deeper networks start converging, a degradation problem has been exposed: with the network depth increasing, accuracy gets saturated (which might be unsurprising) and then degrades rapidly. Unexpectedly, such degradation is not caused by overfitting, and adding more layers to a suitably deep model leads to higher training error.
He et al. (2016)
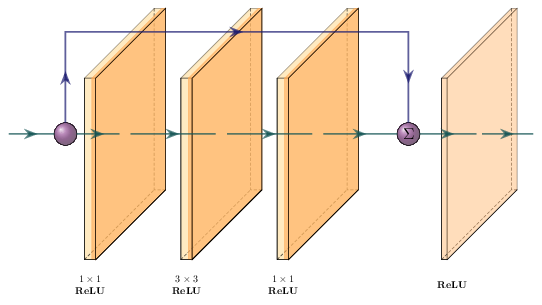
Schematic of a ResNet block. The block contains a \(1\times1\), \(3\times3\), and \(1\times1\) convolution with ReLU activation. The output is concatenated with the input and passed through another ReLU activation function.
The developments and successes in image classification on benchmark competitions like ImageNet and Pascal-VOC inspired applications in automatic seismic interpretation. These networks are usually single image classifiers using convolutional neural networks (CNNs). The first application of a convolutional neural network to seismic data used a relatively small deep convolutional neural network for salt identification (A. U. Waldeland and Solberg 2017). The open source software "MaLenoV" implemented a single image classification network, which was the earliest freely available implementation of deep learning for seismic interpretation (Ildstad and Bormann 2017). Jesper Sören Dramsch and Lüthje (2018b) applied pre-trained VGG-16 and ResNet50 single image seismic interpretation. Recent succesful applications build upon pre-trained pre-built architectures to implement into more sophisticated deep learning systems, e.g. semantic segmentation. Semantic segmentation is important in seismic interpretation. This is already a narrow field of application of machine learning and it can be observed that many early applications focus on sub-subsections of seismic interpretation utilizing these pre-built architectures such as salt detection (A. Waldeland et al. 2018; H. Di, Wang, and AlRegib 2018a; Gramstad and Nickel 2018), fault interpretation (M. Araya-Polo et al. 2017; A. Guitton 2018; S. Purves, Alaei, and Larsen 2018), facies classification (Chevitarese et al. 2018; Jesper Sören Dramsch and Lüthje 2018b), and horizon picking (Wu and Zhang 2018). In comparison, this is however, already a broader application than prior machine learning approaches for seismic interpretation that utilized very specific seismic attributes as input to self-organizing maps (SOM) for e.g. sweet spot identification (Guo et al. 2017; T. Zhao, Li, and Marfurt 2017; R. Roden and Chen 2017).
In geoscience single image classification, as presented in the ImageNet challenge, is less relevant than other applications like image segmentation and time series classification. The developments and insights resulting from the ImageNet challenge were, however, transferred to network architectures that have relevance in machine learning for science. Fully convolutional networks are a way to better achieve image segmentation. A particularly useful implementation, the U-net, was first introduced in biomedical image segmentation, a discipline notorious for small datasets (Ronneberger, Fischer, and Brox 2015a). The U-net architecture shown in Figure 11.15 utilizes several shortcuts in an encoder-decoder architecture to achieve stable segmentation results. Shortcuts (or skip connections) are a way in neural networks to combine the original information and the processed information, usually through concatenation or addition. In ResNet blocks this concept is extended to an extreme, where every block in the architecture contains a shortcut between the input and output, as seen in Figure 11.14. These blocks are universally used in many architectures to implement deeper networks, i.e. ResNet-152 with 60 million parameters, with fewer parameters than previous architectures like VGG-16 with 138 million parameters. Essentially, enabling models that are ten times as deep with less than half the parameters, and significantly better accuracy on image benchmark problems.
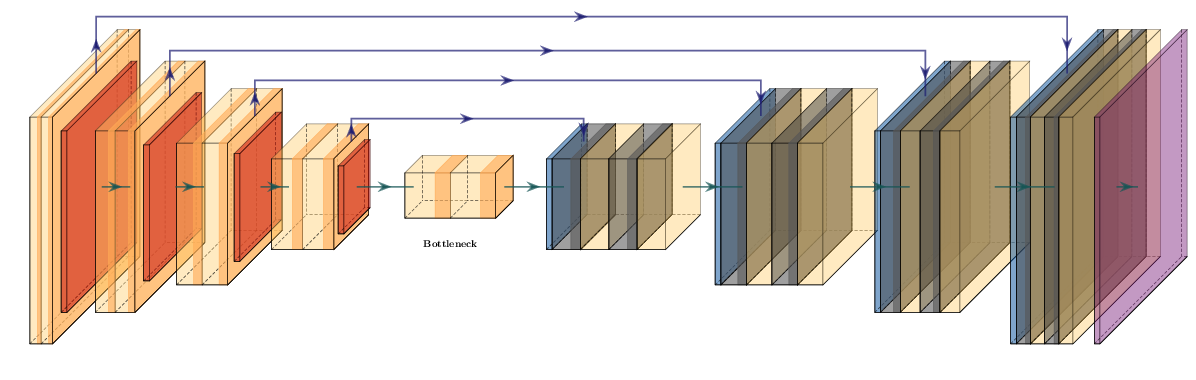
Schematic of Unet architecture. Convolutional layers are followed by a downsampling operation in the encoder. The central bottleneck contains a compressed representation of the input data. The decoder contains upsampling operations followed by convolutions. The last layer is commonly a softmax layer to provide classes. Equally sized layers are connected via shortcut connections.
In 2018 the seismic contractor TGS made a seismic interpretation challenge available on the data science competition platform Kaggle. Successful participants in the competition combined ResNet architectures with the Unet architecture as their base architecture and modified these with state-of-the-art image segmentation applications (Babakhin, Sanakoyeu, and Kitamura 2019a). Moreover, Jesper Sören Dramsch and Lüthje (2018b) showed that transferring networks trained on large bodies of natural images to seismic data yields good results on small datasets, which was further confirmed in this competition. The learnings from the TGS Salt Identification challenge have been incorporated in production scale models that perform human-like salt interpretation (Sen et al. 2020). In broader geoscience, U-nets have been used to model global water storage using GRAVE satellite data (A. Y. Sun et al. 2019), landslide prediction (Hajimoradlou, Roberti, and Poole 2019), and earthquake arrival time picking (W. Zhu and Beroza 2018). A more classical approach identifies subsea scale worms in hydrothermal vents (Shashidhara, Scott, and Marburg 2020), whereas Jesper Sören Dramsch, Christensen, et al. (2019) includes a U-net in a larger system for unsupervised 3D timeshift extraction from 4D seismic.
This modularity of neural networks can be seen all throughout the research and application of deep learning. New insights can be incorporated into existing architectures to enhance their predictive power. This can be in the form of swapping out the activation function \(\sigma\) or including new layers for improvements e.g. regularization with batch normalization (Ioffe and Szegedy 2015). The U-net architecture originally is relatively shallow, but was modified to contain a modified ResNet for the Kaggle salt identification challenge instead (Babakhin, Sanakoyeu, and Kitamura 2019a). Overall, serving as examples for the flexibility of neural networks.
Generative Adversarial Networks
Generative adversarial networks (GAN) take composition of neural network to another level, where two networks are trained in aggregate to get a desired result. In GANs, a generator network \(G\) and a discriminator network \(D\) work against each other in the training loop (I. Goodfellow et al. 2014a). The generator \(G\) is set up to generate samples from an input, these were often natural images in early GANs, but has now progressed to anything from time series (Engel et al. 2019) to high-energy physics simulation (Paganini, Oliveira, and Nachman 2018). The discriminator network \(D\) attempts to distinguish whether the sample is generated from \(G\) i.e. fake or a real image from the training data. Mathematically, this defines a min max game for the value function \(V\) of \(G\) and \(D\)
with \(x\) representing the data, \(z\) is the latent space \(G\) draws samples from, and \(p\) represents the respective probability distributions. Eventually reaching a Nash equlibrium (Nash 1951), where neither the generator network \(G\) can produce better outputs, nor the discriminator network \(D\) can improve its capability to discern between fake and real samples.
Despite how versatile U-nets are, they still need an appropriate defined loss function and labels to build a discriminative model. GANs however, build a generative model that approximates the training sample distribution in the Generator and a discriminative model of the Discriminator modeled dynamically through adversarial training. The Discriminator effectively providing an adversarial loss in a GAN. In addition to providing two models that serve different purposes, learning the training sample distribution with an adversarial loss makes GANs one of the most versatile models currently discovered. Lukas Mosser, Dubrule, and Blunt (2017) were applied GANs early on to geoscience, modeling 3D porous media at the pore scale with a deep convolutional GAN. The authors extended this approach to conditional simulations of oolithic digital rock (Lukas Mosser, Dubrule, and Blunt 2018a). Early applications of GANs also included approximating the problem of velocity inversion of seismic data (Lukas Mosser, Kimman, Dramsch, Purves, De la Fuente Briceño, et al. 2018) and generating seismograms (Krischer and Fichtner 2017). Richardson (2018) integrate the Generator of the GAN into full waveform inversion of the scalar wavefield. Alternatively, a Bayesian inversion using the Generator as prior for velocity inversion was introduced in Lukas Mosser, Dubrule, and Blunt (2018b). In geomodeling, generation of geological channel models was presented (Chan and Elsheikh 2017), which was subsequently extended with the capability to be conditioned on physical measurements (Dupont et al. 2018). Naturally, GANs were applied to the growing field of automatic seismic interpretation (P. Lu et al. 2018).
Recurrent Neural Network Architectures
The final type of architecture applied in geoscience is recurrent neural networks (RNN). In contrast to all previous architectures, recurrent neural networks feed back into themselves. There are many types of RNNs, Hopfield networks being one that were applied to seismic source wavelet prediction (L. X. Wang and Mendel 1992) early on. However, LSTMs (Hochreiter and Schmidhuber 1997) are the main application in geoscience and wider machine learning. This type of network achieves state-of-the-art performance on sequential data like language tasks and time series applications. LSTMs solve some common problems of RNNs by implementing specific gates that regulate information flow in an LSTM cell, namely, input gate, forget gate, and output gate, visualized in Figure 11.16. The input gate feeds input values to the internal cell. The forget gate overwrites the previous state. Finally, the output gate regulates the direct contribution of the input value to the output value combined with the internal state of the cell. Additionally, a peephole functionality helps with the training that serves as a shortcut between inputs and gates.
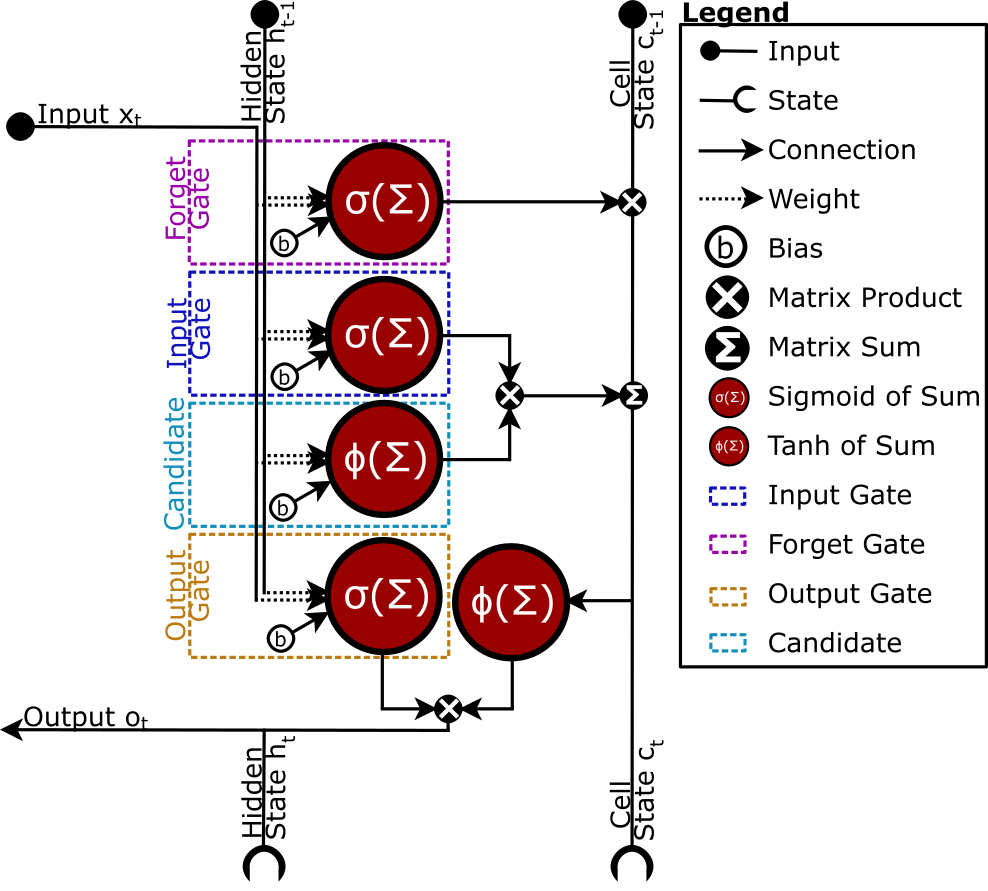
Schematic of LSTM architecture. The input data is processed together with the hidden state and cell state. The LSTM avoid the exploding gradient problem by implemented a input, forget, and output gate.
A classic application of LSTMs is text analysis and natural language understanding, which has been applied to geological relation extraction from unstructured text documents (Luo et al. 2017; Blondelle et al. 2017). Due to the nature of LSTMs being suited for time series data, it is has been applied to seismological event classification of volcanic activity (Titos et al. 2018), multi-factor landslide displacement prediction (P. Xie, Zhou, and Chai 2019), and hydrological modelling (Kratzert et al. 2019). Talarico, Leäo, and Grana (2019) applied LSTM to model sedimentological sequences and compared the model to baseline Hidden Markov Model (HMM), concluding that RNNs outperform HMMs based on first-order Markov chains, while higher order Markov chains were too complex to calibrate satisfactorily. Gated Recurrent Unit (GRU) (K. Cho et al. 2014) is another RNN developed based on the insights into LSTM, which was applied to predict petrophysical properties from seismic data (Alfarraj and AlRegib 2019).
The scope of this review only allowed for a broad overview of types of networks, that were successfully applied to geoscience. Many more specific architectures exist and are in development that provide different advantages. Siamese networks for one-shot image analysis (Koch, Zemel, and Salakhutdinov 2015), transformer networks that largely replaced LSTM and GRU in language modelling (Vaswani et al. 2017), or attention as a general mechanism in deep neural networks (H. Zheng et al. 2017).
Neural network architectures have been modified and applied to diverse problems in geoscience. Every architecture type is particularly suited to certain data types that are present in each field of geoscience. However, fields with data present in machine-readable format experienced accelerated adoption of machine learning tools and applications. For example, Z. E. Ross, Meier, and Hauksson (2018) were able to successfully apply convolutional neural networks to seismological phase detection, relying on an extensive catalogue of hand-picked data (Z. E. Ross, Meier, and Hauksson 2018) and consequently generalize this work (Zachary E. Ross et al. 2018b). It has to be noted that synthetic or specifically sampled data can introduce an implicit bias into the network (Wirgin 2004; Kim et al. 2019). Nevertheless, particularly this blackbox property of machine learning model makes them versatile and powerful tools that were leveraged in every subdiscipline of the Earth sciences.
The State of machine learning on Geoscience
Overall, geoscience and especially geophysics has followed developments in machine learning closely. Across disciplines, machine learning methods have been applied to various problems that can generally be categorized into three subsections:
Build a surrogate machine learning model of a well-understood process. This model usually provides an advantage in computational cost.
Build an machine learning model of a task previously only possible with human interaction, interpretation, or knowledge and experience.
Build a novel machine learning model that performs a task that was previously not possible.
Granulometry on SEM images is an example of an application in category I, where previously sediments were hand-measured in images (Jesper Sören Dramsch, Amour, and Lüthje 2018). Applying large deformation diffeomorphic mapping of seismic data was computationally infeasible for matching 4D seismic data, however, made feasible by applying a U-net architecture to the problem of category II (Jesper Sören Dramsch, Christensen, et al. 2019). The problem of earthquake magnitude prediction falls into category III due to the complexity of the system but was nevertheless approached with neural networks (Panakkat and Adeli 2007).
The accessibility of tools, knowledge, and compute make this cycle of machine learning enthusiasm unique, with regard to previous decades. This unprecedented access to tools makes the application of machine learning algorithms to any problem possible, where data is available. The bibliometrics of machine learning in geoscience, shown in figure 11.17 serve as a proxy for increased access. These papers include varying degrees of depth in application and model validation. One of the primary influences for the current increase in publications are new fields such as automatic seismic interpretation, as well as, publications soliciting and encouraging machine learning publications. Computer vision models were relatively straight forward to transfer to seismic interpretation tasks, with papers in this sub-sub-field ranging from single 2D line salt identification models with limited validation to 3D multi-facies interpretation with validation on a separate geographic area.
Geoscientific publishing can be challenging to navigate with respect to machine learning. While papers investigating the theoretical fundamentals of machine learning in geoscience exist, it is clear that the overwhelming majority of papers present applications of machine learning to geoscientific problems. It is complex to evaluate whether a paper is a case study or a methodological paper with an exemplary application to a specific data set. Despite the difficulty of most thorough applications of machine learning, "idea papers" exist that simply present an established algorithm to a problem in geoscience without a specific implementation or addressing the possible caveats. On the flip-side, some papers apply machine learning algorithms as pure regression models without the aim to generalize the model to other data. Unfortunately, this makes meta-analysis articles difficult to impossible. This kind of meta-analysis article, is commonly done in medicine and considered a gold-standard study, and would greatly benefit the geoscientific community to determine the efficacy of algorithms on sets of similar problems.
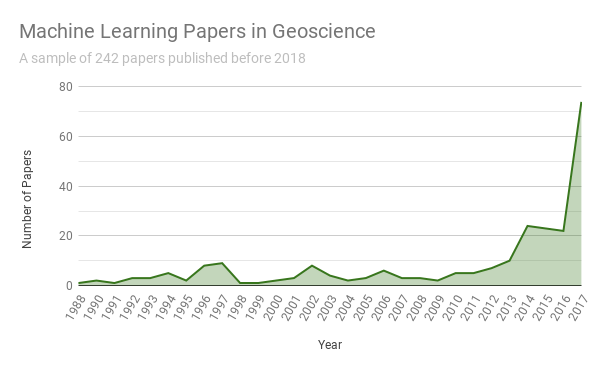
Bibliometry of 242 papers in Machine Learning for Geoscience per year. Search terms include variations of machine learning terms and geoscientific subdisciplines but exclude remote sensing and kriging.
Analogous to the medical field, obtaining accurate ground truth data, is often impossible and usually expensive. Geological ground truth data for seismic data is usually obtained through expert interpreters. Quantifying the uncertainty of these interpretations is an active field of research, which suggest a broader set of experiences and a diverse set of sources of information for interpretation facilitate correct geological interpretation between interpreters (Bond et al. 2007). Radiologists tasked to interpret x-ray images showed similar decreases in both inter- and intra-interpreter error rate with more diverse data sources (Jewett et al. 1992). These uncertainties in the training labels are commonly known as "label noise" and can be a detriment to building accurate and generalizable machine learning models. A significant portion of data in geoscience, however, is not machine learning ready. Actual ground truth data from drilling reports is often locked away in running text reports, sometimes in scanned PDFs. Data is often siloed and most likely proprietary. Sometimes the amount of samples to process is so large that many insights are yet to be made from samples in core stores or the storage rooms of museums. Benchmark models are either non-existent or made by consortia that only provide access to their members. Academic data is usually only available within academic groups for competitive advantage, respect for the amount of work, and fear of being exposed to legal and public repercussions. These problems are currently addressed by a culture change. Nevertheless, liberating data will be a significant investment, regardless of who will work on it and a slow culture change can be observed already.
Generally, machine learning has seen the fastest successes in domains where decisions are cheap (e.g. click advertising), data is readily available (e.g. online shops), and the environment is simple (e.g. games) or unconstrained (e.g. image generation). Geoscience generally is at the opposite of this spectrum. Decisions are expensive, be it drilling new wells or assessing geohazards. Data is expensive, sparse, and noisy. The environment is heterogeneous and constrained by physical limitations. Therefore, solving problems like automatic seismic interpretation see a surge of activity having fewer constraints initially. Problems like inversion have solutions that are verifiably wrong due to physics. These constraints do not prohibit machine learning applications in geoscience. However, most successes are seen in close collaboration with subject matter experts. Moreover, model explainability becomes essential in the geoscience domain. While not being a strict equivalency, simpler models are usually easier to interpret, especially regarding failure modes.
A prominent example of "excessive" (Mignan and Broccardo 2019a) model complexity was presented in P. M. DeVries et al. (2018) applying deep learning to aftershock prediction. Independent data scientists identified methodological errors, including data leakage from the train set to the test set used to present results (Shah and Innig 2019). Moreover, Mignan and Broccardo (2019b) showed that using the central physical interpretation of the deep learning model, using the von Mises yield criterion, could be used to build a surrogate logistic regression. The resulting surrogate or baseline model outperforms the deep network and overfits less. Moreover, replacing the ~13,000 parameter model with the two-parameter baseline model increases calculation speed, which is essential in aftershock forecasting and disaster response [3]. More generally, this is an example where data science practices such as model validation, baseline models, and preventing data leakage and overfitting become increasingly important when the tools of applying machine learning become readily available.
Despite potential setbacks and the field of deep learning and data science being relatively young, they can rely on mathematical and statistical foundations and make significant contributions to science and society. Machine learning systems have contributed to modelling the protein structure of the current pandemic virus COVID-19 (Jumper et al. 2020). A deep learning computer vision system was built to stabilize food safety by identifying Cassava plant disease on offline mobile devices (Ramcharan et al. 2017, 2019). Self-driving cars have become a possibility (Bojarski et al. 2016) and natural language understanding has progressed significantly (Devlin et al. 2018).
Geoscience is slower in the adoption of machine learning, compared to other disciplines. To be able to adapt the progress in machine learning research, many valuable data sources have to be made machine-readable. There has already been a change in making computer code open source, which has lead to collaborations and accelerating scientific progress. While specific open benchmark data sets have been tantamount to the progress in machine learning, it is questionable whether these would be beneficial to machine learning in geoscience. The problems are often very complex with non-unique explanations and solutions, which historically has lead to disagreements over geophysical benchmark data sets. Open data and open-source software, however, have and will play a significant role in advancing the field. Examples of this include basic utility function to load geoscientific data (Kvalsvik and Contributors 2019) or more specifically cross-validation functions tailored to geoscience (Uieda 2018).
Moreover, machine learning is fundamentally conservative, training on available data. This bias of data collection will influence the ability to generate new insights in all areas of geoscience. Machine learning in geoscience may be able to generate insights and establish relationships in existing data. Entirely new insights from previously unseen or analysis of particularly complex models will still be a task performed by trained geoscientists. Transfer learning is an active field of machine learning research, that geoscience can significantly benefit from. However, no significant headway has been made to transfer trained machine learning models to out-of-distribution data, i.e. data that is conceptually similar but explicitly different from the training data set. The fields of self-supervised learning, including reinforcement learning that can learn by exploration, may be able to approach some of these problems. They are, however, notoriously hard to set up and train, necessitating significant expertise in machine learning.
Large portions of publications are concerned with weakly or unconstrained predictions such as seismic interpretation and other applications that perform image recognition on SEM or core photography. These methods will continue to improve by implementing algorithmic improvements from machine learning research, specialized data augmentation strategies, and more diverse training data being available. New techniques such as multi-task learning (Kendall, Gal, and Cipolla 2018) which improved computer vision and computer linguistic models, deep bayesian networks (L. Mosser, Oliveira, and Steventon 2019) to obtain uncertainties, noisy teacher-student networks (Q. Xie et al. 2019) to improve training, and transformer networks (Graves 2012) for time series processing, will significantly improve applications in geoscience. For example, automated seismic interpretation may advance to provide reliable outputs for relatively difficult geological regimes beyond existing solutions. Success will be reliant on interdisciplinary teams that can discern why geologically specific faults are important to interpret, while others would be ignored in manual interpretations, to encode geological understanding in automatic interpretation systems.
Currently, the most successful applications of machine learning and deep learning, tie into existing workflows to automate sub-tasks in a grander system. These models are highly specific, and their predictive capability does not resemble an artificial intelligence or attempt to do so. Mathematical constraints and existing theory in other applied fields, especially neuroscience, were able to generate insights into deep learning and geoscience has the opportunity to develop significant contributions to the area of machine learning, considering their unique problem set of heterogeneity, varying scales and non-unique solutions. This has already taken place with the wider adoption of "kriging" or more generally Gaussian processes into machine learning. Moreover, known applications of signal theory and information theory employed in geophysics are equally applicable in machine learning, with examples utilizing complex-valued neural networks (Trabelsi et al. 2017), deep Kalman filters (Krishnan, Shalit, and Sontag 2015), and Fourier analysis (Tancik et al. 2020). Therefore, possibly enabling additional insights, particularly when integrated with deep learning, due to its modularity and versatility.
Previous reservations about neural networks included the difficulty of implementation and susceptibility to noise in addition to computational costs. Research into updating trained models and saving the optimizer state with the model has in part alleviated the cost of re-training existing models. Moreover, fine-tuning pre-trained large complex models to specific problems has proven successful in several domains. Regularization techniques and noise modelling, as well as data cleaning pipelines, can be implemented to lessen the impact of noise on machine learning models. Specific types of noise can be attenuated or even used as an additional source of information. The aforementioned concerns have mainly transitioned into a critique about overly complex models that overfit the training data and are not interpretable. Modern software makes very sophisticated machine learning models, and data pipelines available to researchers, which has, in turn, increased the importance to control for data leakage and perform thorough model validation.
Currently, machine learning for science primarily relies on the emerging field of explainability (Lundberg et al. 2018). These provide primarily post-hoc explanations for predictions from models. This field is particularly important to evaluate which inputs from the data have the strongest influence on the prediction result. The major point of critique regarding post-hoc explanations is that these methods attempt to explain how the algorithm reached a wrong prediction with equal confidence. Bayesian neural networks intend to address this issue by providing confidence intervals for the prediction based on prior beliefs. These neural networks intend to incorporate prior expert knowledge into neural networks, which can be beneficial in geoscientific applications, where strong priors can be necessary. Machine learning interpretability attempts to impose constraints on the machine learning models to make the model itself explainable. Closely related to these topics is the statistics field of causal inference. Causal inference attempts to model the cause of variable, instead of correlative prediction. Some methods exist that can perform causal machine learning, i.e. causal trees (Athey and Imbens 2016). These three fields will be necessary to glean verifiable scientific insights from machine learning in geoscience. They are active fields of research and more involved to correctly apply, which often makes cooperation with a statistician necessary.
In conclusion, machine learning has had a long history in geoscience. Kriging has progressed into more general machine learning methods, and geoscience has made significant progress applying deep learning. Applying deep convolutional networks to automatic seismic interpretation has progressed these methods beyond what was possible, albeit still being an active field of research. Using modern tools, composing custom neural networks, and conventional machine learning pipelines has become increasingly trivial, enabling wide-spread applications in every sub-field of geoscience. Nevertheless, it is important to acknowledge the limitations of machine learning in geoscience. Machine learning methods are often cutting-edge technology, yet properly validated models take time to develop, which is often perceived as inconvenient when working in a hot scientific field. Despite being cutting edge, it is important to acknowledge that none of these applications are fully automated, as would be suggested by the lure of artificial intelligence. Nevertheless, within applied geoscience, significant new insights have been presented. Applications in geoscience are using machine learning as a utility for data pre-processing, implementing previous insights beyond the theory and synthetic cases, or the model itself enabling unprecedented applications in geoscience. Overall, applied machine learning has matured into an established tool in computational geoscience and has the potential to provide further insights into the theory of geoscience itself.
Contributions of this Study
This chapter provides the basic principles in 4D seismic and an overview of machine learning in geoscience in the last 70 years. This lays the foundation for the applications outlined in the following chapters that use convolutional neural networks on seismic data, as well as dnns on seismic maps. Specialized theory and methods are introduced in their respective chapters. The work in this chapter resulted in a review book chapter (Jesper Sören Dramsch 2020c) with the code available in (Jesper Sören Dramsch 2020a).